Architecture
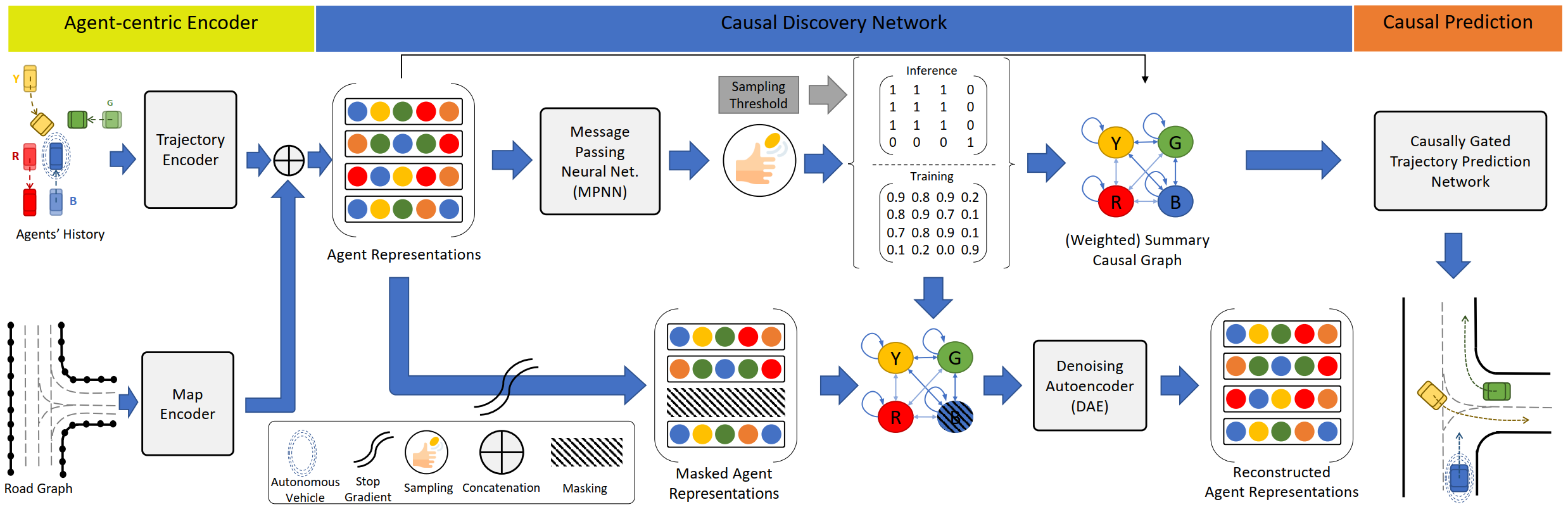
An overview of CRiTIC. In this architecture, Causal Discovery Network receives the map-aware agent representations and generates a causality adjacency matrix. The matrix is used by a Transformer-based prediction backbone to shape the attention toward the causal agents.
An overview of CRiTIC. In this architecture, Causal Discovery Network receives the map-aware agent representations and generates a causality adjacency matrix. The matrix is used by a Transformer-based prediction backbone to shape the attention toward the causal agents.